This project was made using OpenGL/OpenTK and was written in C#. It includes basic 3D rendering and a physics engine. My aim with this project was to better understand the maths behind games and 3D rendering, so I avoided using external maths libraries. This meant I had to implement vectors, matrices, quaternions, and even my own sine function.
For this write-up, I have left out the work on implementing OpenTK and the physics engine, because although they represented the bulk of my efforts here, there isn’t much to say as my implementations are well known solutions.

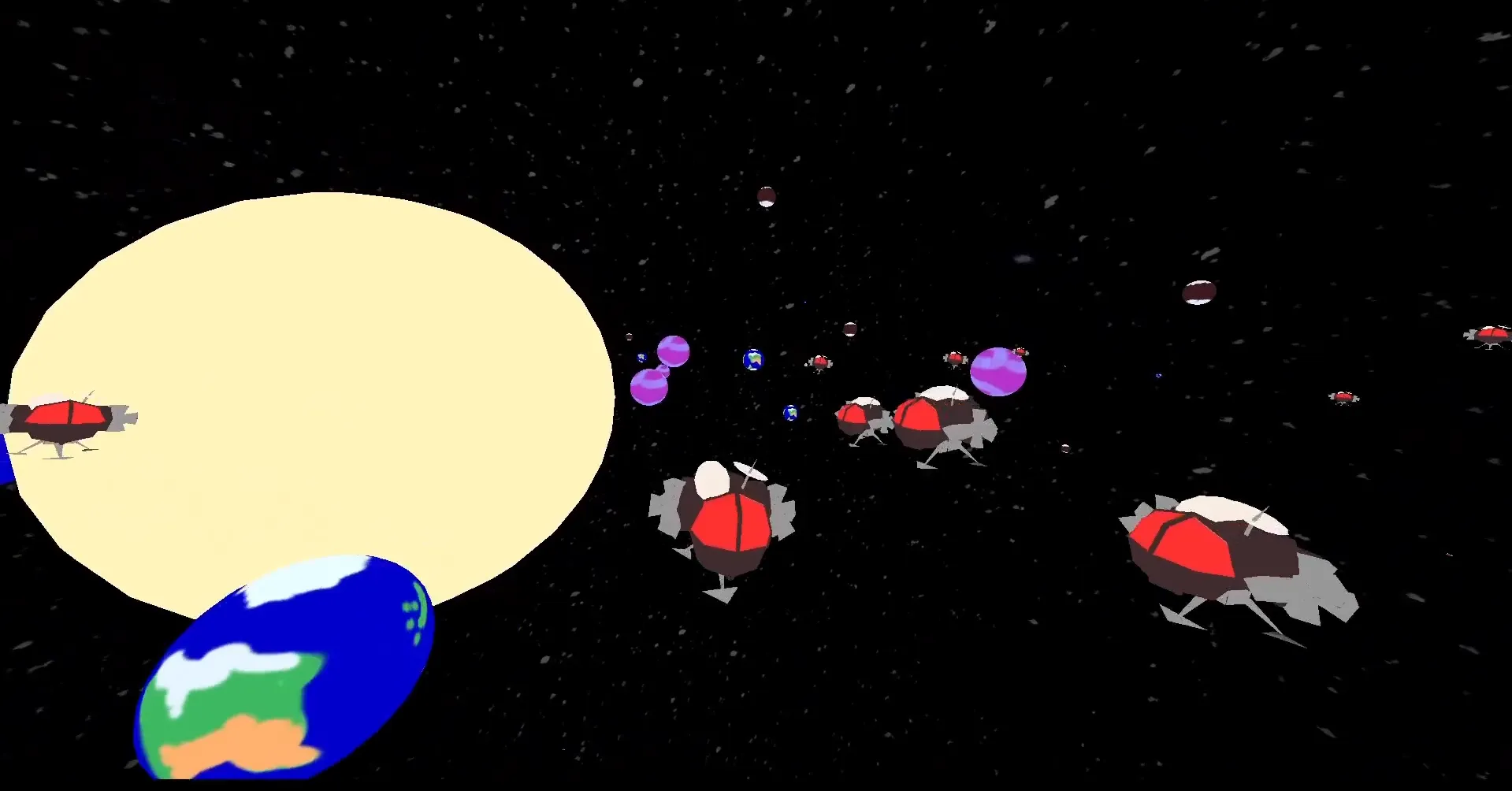
Solar System
Placing Planets
To begin with, planet locations are set by scaling a random direction vector by the incremental distance from the star:
distanceFromSun += Maths.RandomFloat(400f, 700f);
float planetDirectionRad = Maths.RandomFloat(0f, Maths.Tau);
Vec2 planetDirection = new Vec2(Maths.Cos(planetDirectionRad),
Maths.Sin(planetDirectionRad));
Vec3 planetPosition = new Vec3(planetDirection.X,
Maths.RandomFloat(-0.1f,0.1f),
planetDirection.Y
) * distanceFromSun;Then, in order to maintain semi-stable orbits, the correct velocities need to be set. For solo planets this is very simple, as orbital velocity is just:
However, for moons and binary planets, they need to be made to orbit each other as well as the star. This means that the orbital velocity around the sun needs to be calculated for their combined mass, and using the barycentre, which is the centre of mass of the two planets. Then, the velocities are calculated using:
Or in code:
float planetARadius = Maths.RandomFloat(3f, 40f);
float planetBRadius = Maths.RandomFloat(3f, 40f);
Planet planetA = new Planet(planetARadius);
Planet planetB = new Planet(planetBRadius);
float distance = planetARadius + planetBRadius + Maths.RandomFloat(5f, 20f);
float baryDistanceA = planetB.GetMass() / (planetB.GetMass() + planetA.GetMass()) * distance;
float baryDistanceB = planetA.GetMass() / (planetA.GetMass() + planetB.GetMass()) * distance;
planetA.Position = planetPosition + new Vec3(baryDistanceA, 0, 0);
planetB.Position = planetPosition - new Vec3(baryDistanceB, 0, 0);
float binaryVelocityA = MathF.Sqrt(
Scene.G * planetB.GetMass() / (distance * distance) * baryDistanceA);
float binaryVelocityB = MathF.Sqrt(
Scene.G * planetA.GetMass() / (distance * distance) * baryDistanceB);
planetA.Velocity = new Vec3(0, 0, -binaryVelocityA);
planetB.Velocity = new Vec3(0, 0, binaryVelocityB);
orbitalVelocity = MathF.Sqrt(Scene.G * sun.GetMass() / distanceFromSun);
orbitalDirection = new Vec3(
Maths.RotateVector(planetDirection, 90f).X,
0,
Maths.RotateVector(planetDirection, 90f).Y);
planetA.Velocity += orbitalDirection * orbitalVelocity;
planetB.Velocity += orbitalDirection * orbitalVelocity;Maths
Sine
I reviewed a few different options for this, such as a Taylor series or a CORDIC algorithm, but in the end I decided this would be the simplest. I used Bhāskara I’s sine approximation, which is a really simple formula:
Or for cosine:
This produces this graph, where blue is , red is the formula:
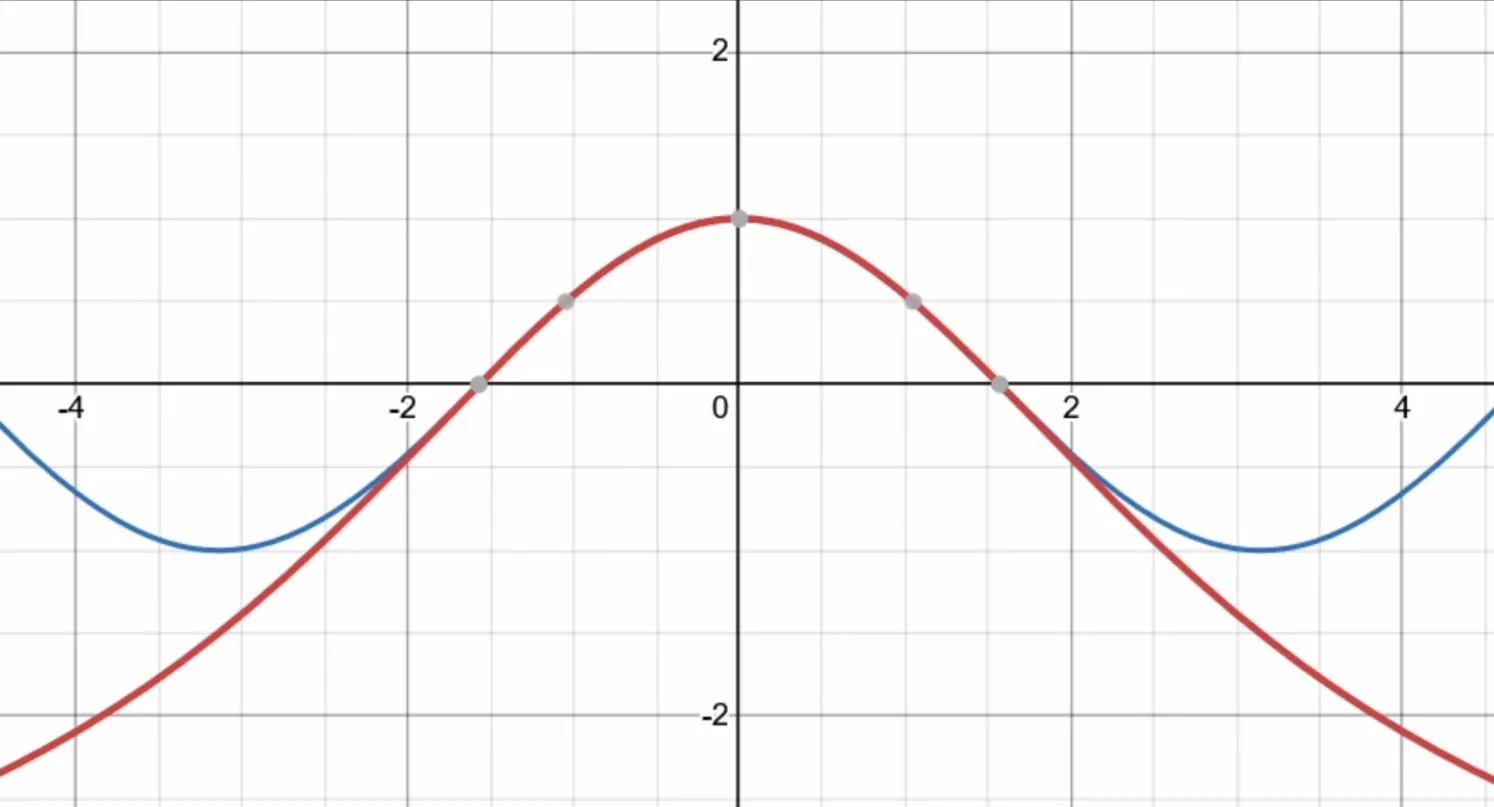
Which can then be translated to account for the lack of repetition in the curve:
public static float Sin(float rad) => Cos(rad - TauOver4);
public static float Cos(float rad)
{
rad %= Tau;
rad = Abs(rad);
int sign = 1;
switch (rad)
{
case < TauOver4:
break;
case < Pi:
sign = -1;
rad = TauOver4 - (rad - TauOver4);
break;
case < Tau3Over4:
sign = -1;
rad -= Pi;
break;
case <= Tau:
rad = Pi - (rad - Pi);
break;
}
return sign * ((PiSqr - 4 * rad * rad) / (PiSqr + rad * rad));
}Vectors and Matrices
I decided to store matrices by their columns rather than by their rows:
public class Mat4
{
public Vec4 C0, C1, C2, C3;
...
}This made the multiplication very simple:
public static Mat3 operator *(Mat3 b, Mat3 a)
=> new(b.C0 * a, b.C1 * a, b.C2 * a);
public static Vec3 operator *(Vec3 v, Mat3 m)
=> v.X * m.C0 + v.Y * m.C1 + v.Z * m.C2;I also implemented a function to invert 3x3 matrices by finding the determinant of the minor of each element, changing the signs, transposing it, and then dividing by the determinant:
public Mat3 Inverse()
{
float[,] matTemp =
{
{ C0.X, C0.Y, C0.Z },
{ C1.X, C1.Y, C1.Z },
{ C2.X, C2.Y, C2.Z }
};
float[,] result =
{
{ 0, 0, 0 },
{ 0, 0, 0 },
{ 0, 0, 0 }
};
for (int c = 0; c < 3; c++)
{
for (int r = 0; r < 3; r++)
{
result[c, r] = Minor(matTemp, c, r);
}
}
Mat3 matResult = new(result);
matResult.C0.Y *= -1;
matResult.C1.X *= -1;
matResult.C1.Z *= -1;
matResult.C2.Y *= -1;
matResult = matResult.Transpose();
return matResult / Determinant();
}
public float Minor(float[,] mat, int c, int r)
{
float[,] result = { { 1, 0 }, { 0, 1 } };
int xx = 0;
for (int col = 0; col < 3; col++)
{
if (col == c)
{
continue;
}
int yy = 0;
for (int row = 0; row < 3; row++)
{
if (row == r)
{
continue;
}
result[xx, yy] = mat[col, row];
yy++;
}
xx++;
}
return new Mat2(result).Determinant();
}I also coded each part of the TRS matrix which is fed into the vertex shader:
Shader0.SetMatrix4("model", translation * rotation * scale);For rotation, I stored rotation on Body as a quaternion, and then converted it into a matrix with the formula:
public static Mat4 Rotation(Quaternion q)
{
q = q.Normalised();
float ySqr2 = 2 * q.V.Y * q.V.Y;
float xSqr2 = 2 * q.V.X * q.V.X;
float zSqr2 = 2 * q.V.Z * q.V.Z;
float xy2 = 2 * q.V.X * q.V.Y;
float wz2 = 2 * q.W * q.V.Z;
float xz2 = 2 * q.V.X * q.V.Z;
float wy2 = 2 * q.W * q.V.Y;
float yz2 = 2 * q.V.Y * q.V.Z;
float wx2 = 2 * q.W * q.V.X;
return new(
1f - (ySqr2 + zSqr2), xy2 + wz2, xz2 - wy2, 0f,
xy2 - wz2, 1 - (xSqr2 + zSqr2), yz2 + wx2, 0f,
xz2 + wy2, yz2 - wx2, 1 - (xSqr2 + ySqr2), 0f,
0f, 0f, 0f, 1f
);
} Quaternions
I decided to use quaternions to represent rotation because they are faster and more reliable. It also made implementing a SLERP really easy:
public static Quaternion Slerp(Quaternion q1, Quaternion q2, float t)
{
if (q1.MagnitudeSquared() == 0.0f)
{
if (q2.MagnitudeSquared() == 0.0f)
{
return Identity;
}
return q2;
}
if (q2.MagnitudeSquared() == 0.0f)
{
return q1;
}
var cosHalfAngle = Dot(q1, q2);
if (cosHalfAngle >= 1.0f || cosHalfAngle <= -1.0f)
{
return q1;
}
if (cosHalfAngle < 0.0f)
{
q2 *= -1;
cosHalfAngle = -cosHalfAngle;
}
float blendA;
float blendB;
if (cosHalfAngle < 0.99f)
{
float halfAngle = MathF.Acos(cosHalfAngle);
float sinHalfAngle = MathF.Sin(halfAngle);
float oneOverSinHalfAngle = 1.0f / sinHalfAngle;
blendA = MathF.Sin(halfAngle * (1.0f - t)) * oneOverSinHalfAngle;
blendB = MathF.Sin(halfAngle * t) * oneOverSinHalfAngle;
}
else
{
blendA = 1.0f - t;
blendB = t;
}
Quaternion result = q1 * blendA + q2 * blendB;
if (result.MagnitudeSquared() > 0.0f)
{
return result.Normalised();
}
return Identity;
}To get the enemies to point towards the player, I get the vector between them, normalise it, cross it with to generate a right vector, then a new up vector from those. These then become the columns of a matrix, which is converted into the quaternion to be SLERP-ed with the current rotation:
public Quaternion ToQuat()
{
Vec3 v = Normalised();
Vec3 right = Cross(v, UnitY);
Vec3 up = Cross(right, v);
Mat3 m = new(right, v, up);
return m.ToQuat();
}Reflections
I have learned more on this project than any other since I started learning how to code in the spring of 2023. Building a physics engine and 3D renderer from the ground up covers so many areas. I had to learn some linear algebra, quaternions, collisions, rigid body physics, shaders, the graphics pipeline, etc. All of these areas are foundational in the industry, and while I have a lot left to learn, I hope that this has given me a strong foundation.